(原标题:AutelClaw:具身机器人“第二大脑”的双路线技术内核)
在具身智能工业化落地的赛道上,“让LLM成为机器人的第二大脑”不再是概念,而是道通科技AutelClaw正在落地的核心目标。AutelClaw的意义在于让道通的机器人从 “被动执行工具” 升级为 “自主可控的智能体“。不同于泛泛的智能调度,AutelClaw以两大技术路线为核心、Rust工业级架构为底座,通过可闭环、可复用、高安全的技术设计,破解机器人感知-决策断层、多硬件碎片化等行业痛点,其背后的科技原理与技术逻辑,正是其核心竞争力所在。
本文将聚焦Autel EdgeClaw的核心技术路线、底层原理与技术突破,带你读懂具身机器人“自主进化”的底层逻辑。
一、核心行业痛点
当前机器人与AI Agent领域存在三大核心技术裂缝,也是行业落地的主要瓶颈,结合工业实际应用场景,具体表现为:
• 感知-决策断层:视觉摄像头、各类传感器采集的物理世界数据(如巡检场景的设备图像、位置坐标、环境参数),与LLM的决策链路相互孤立,缺乏自动化桥接机制,需人工手动处理数据、编写适配代码实现联动。这直接导致机器人“看得见、读得到”,却“读不懂、不会动”,无法形成“感知-决策-执行”的实时闭环,比如工业巡检机器人无法自主识别设备异常并完成后续处置,仍需人工全程介入。
• 安全边界缺失:多数Agent框架以“能力最大化”为核心目标,未内置工业级安全策略,而工业现场中,机器人的每一个动作都对应真实物理后果――比如机械臂误抓取、误碰撞,可能导致设备损坏、生产停工,甚至人员安全风险,这类误动作的代价极高,也是工业场景不敢大规模应用机器人的核心顾虑。
• 多模型/多硬件碎片化:不同LLM提供商(如Google Vertex AI、OpenAI、Anthropic)的API接口差异显著,不同品牌、不同型号的机器人(如星海图机械臂、UR7E)的控制接口(MCP/MQTT/HTTP/串口)完全异构,缺乏统一适配标准。开发者为每一次集成都要重写适配层代码,无任何复用路径,不仅适配成本高、周期长,还容易出现兼容性问题,严重影响机器人应用的规模化扩展。
二、AutelClaw 解决了什么核心问题?
针对上述三大痛点,Autel EdgeClaw以“工业级Agent运行时”为核心,结合双技术路线协同,精准解决行业核心难题,同时降低落地门槛,具体解决成果如下:
• 破解感知-决策断层:构建专属机器人控制循环(run_robot_control_loop),实现“感知-理解-决策-执行-优化”全流程自动化闭环。无需人工干预,系统可自动拉取传感器/视觉数据,通过RobotDataProcessor预处理为LLM可识别的格式,注入决策链路,执行结果实时回传并驱动策略优化,真正实现机器人“看见即理解,理解即行动”,比如巡检机器人可自主识别设备异常、规划处置动作并执行。
• 筑牢工业级安全防线:设计贴合工业场景的分级安全策略与多层防护机制,既满足机器人自主运行需求,又杜绝误动作风险。通过三档自主度控制(仅观测、人工审批、完全自主),搭配WASI沙箱、E-Stop紧急停机、OTP配对、Prompt注入检测等多重防护,限制机器人操作权限,确保每一个动作都在安全边界内,解决工业场景“安全不可控”的核心顾虑。
• 解决多硬件/多模型适配难题:基于Trait抽象+WASM沙箱插件架构,实现多机型、多LLM模型的快速适配。不同LLM模型可热插拔切换,新机器人接入仅需编写专属WASM插件与配置文件,无需修改核心代码,同一套技能与策略可复用于不同机型、不同场景,大幅降低适配成本与周期,支撑机器人应用规模化扩展。
• 降低落地成本与门槛:通过“仿真验证+真实场景落地”双路线协同,在Isaac Sim+OmniGibson+cuRobo搭建的高保真仿真环境中,可低成本验证新技能、新方案,无需占用真实机器人资源,减少现场试错成本;仿真验证通过的技能与代码可无缝迁移至真实机械臂,缩短从需求到上线的周期,让机器人应用更快落地。

AutelClaw项目核心分解
三、双技术路线深度解析:虚实结合,协同落地
AutelClaw采用“机械臂Skill自优化”与“仿真验证-代码执行”双路线并行策略,两者各司其职、协同互补――路线一聚焦真实场景落地,路线二聚焦低成本验证与能力沉淀,共同推动具身智能的工业化落地,每条路线的技术原理与实施细节如下:
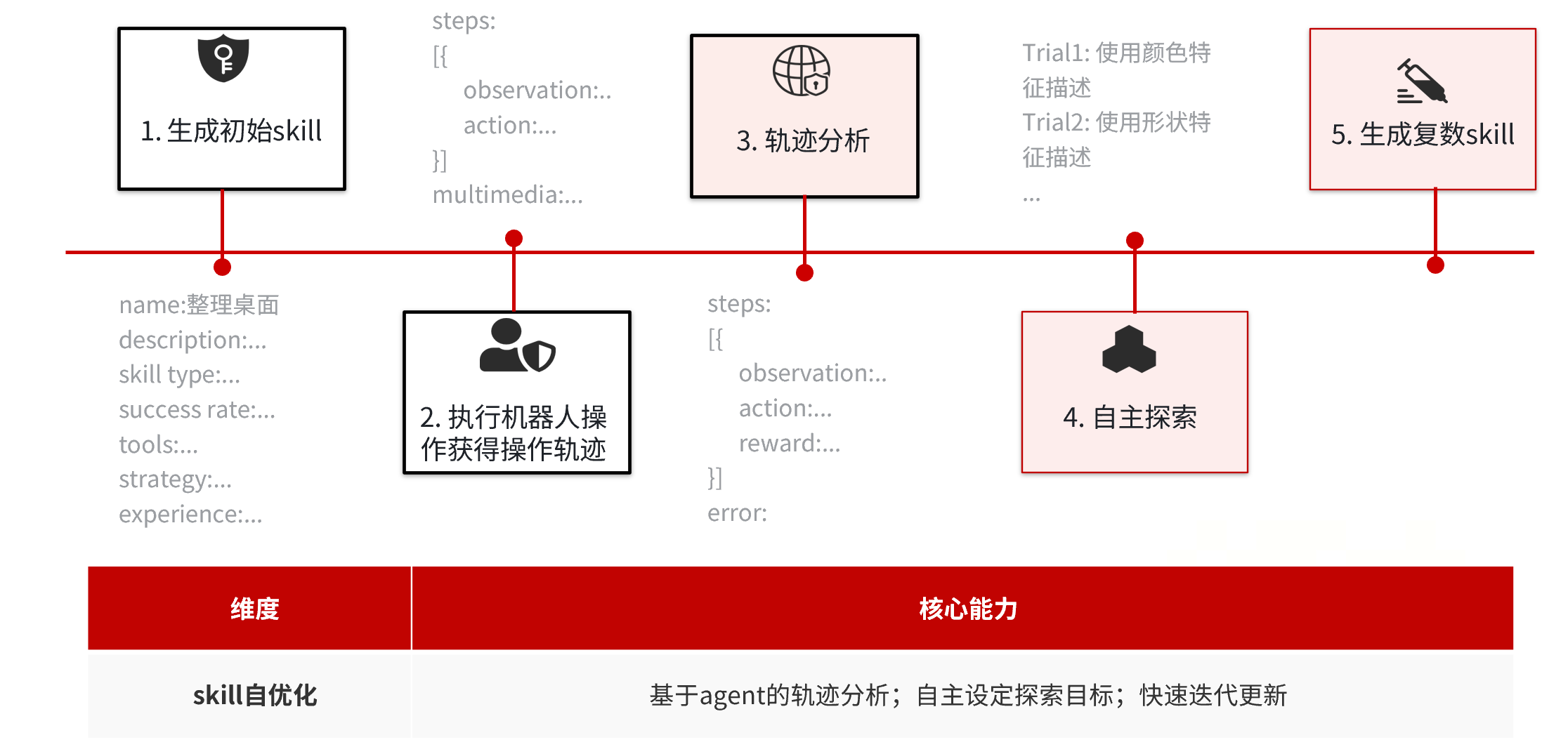
基于轨迹分析、自主设定目标和迭代分析的Skill自优化
路线一:机械臂 ― Skill自优化路线(真实场景闭环)
核心定位:以Skill自优化为主线,构建“任务→Skill→执行→数据反馈→Skill再优化”的专属闭环,通过Skill对具身系统的原子能力进行组合,形成可复用的复杂能力,最终实现多机型、多场景的稳定运行。
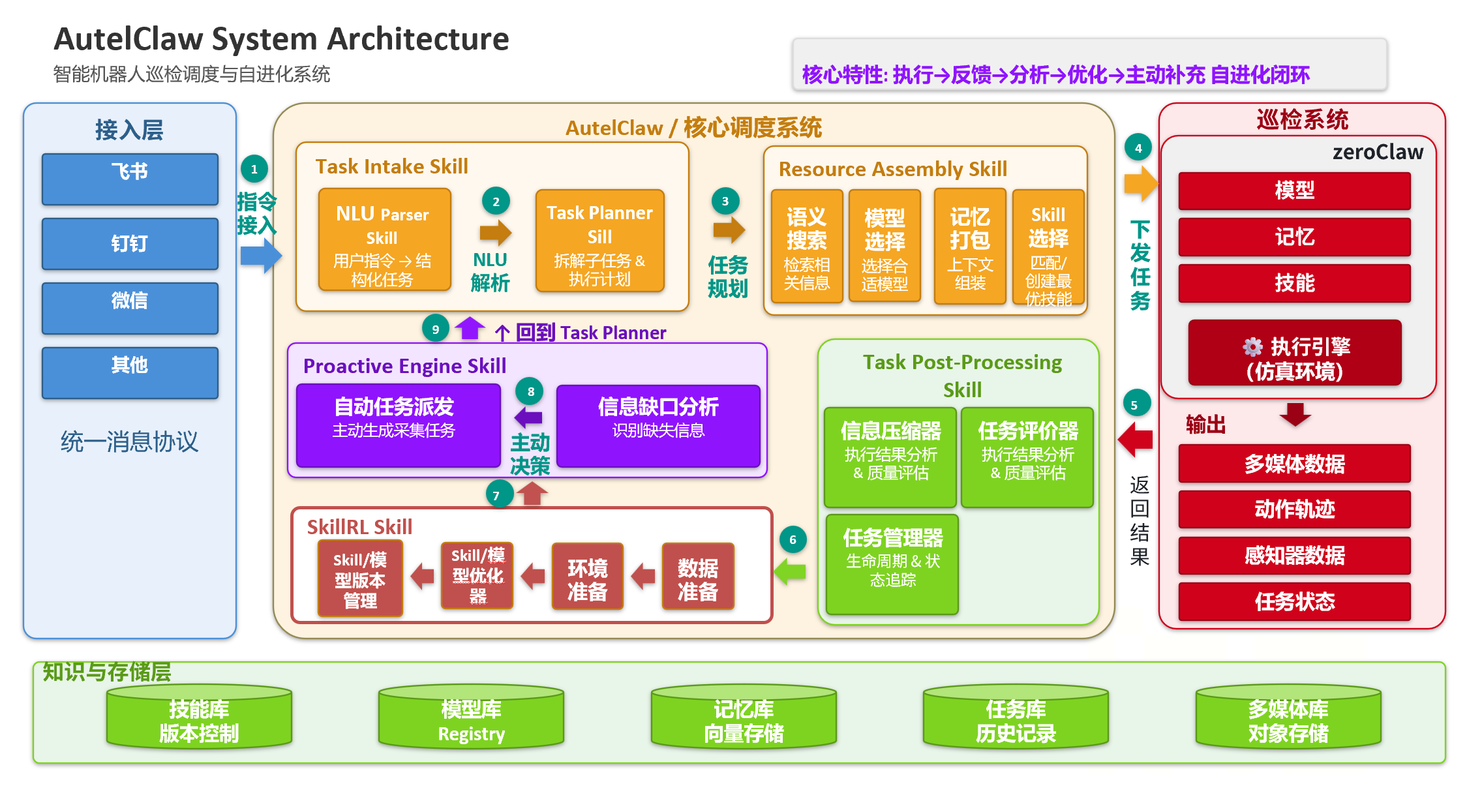
智能机器人巡检调度与自进化系统
1)核心技术原理
Skill本质是“机器人原子动作的组合与封装”(如“抓取→移动→放置”的组合),自优化的核心逻辑是“数据驱动的迭代”,其底层原理分为三个关键环节:
• Skill的原子能力拆分:将机器人复杂动作拆解为可复用的原子能力(如机械臂的伸缩、旋转,夹爪的开合,视觉的识别、定位),每个原子能力对应独立的控制逻辑与接口,通过Trait抽象封装,可自由组合形成复杂Skill;
• 闭环优化的核心逻辑:Agent接收上层任务(如“巡检设备螺丝松动”),自动生成/调用对应Skill,驱动机器人执行;执行过程中,通过传感器采集位置精度、动作成功率、环境参数等数据,回传至Agent;Agent通过LLM分析数据偏差(如“夹取位置偏移2mm”),自动调整Skill的参数(如修正夹取坐标、调整力度),完成Skill的迭代优化;
• 多机型适配原理:基于Trait抽象与WASM插件架构,不同机型(如星海图机械臂、UR7E)的硬件差异,通过专属WASM插件(command.wasm)进行适配,将统一的Skill指令,转换为对应机型的硬件控制指令,无需修改Skill核心逻辑,实现“一套Skill,多机型复用”。
2)当前技术进展与核心突破
目前该路线已完成核心技术验证,处于优化迭代阶段,关键进展如下:
• 已在机械臂上打通完整Skill自优化闭环(优化→执行→过程数据→再优化),完成基础巡检动作的验证,仅需在标注、优化方向等细节上进一步调优;
• 打通“Skill + 图像反馈→VLA指令系统”,实现“Skill指导执行”的基础能力――大脑可依据Skill通过VLA驱动小脑执行,核心突破是“视觉反馈与Skill执行的实时联动”,解决了传统机械臂“动作与视觉脱节”的问题;
• 启动新机械臂UR7E的VLA能力摸底,正在开发专属WASM适配插件,推进多机型适配工作;
• 现存技术瓶颈:VLA大模型存在2-3秒时延,影响实时执行效果;任务到Skill的自动化生成能力仍需提升(目前未完全实现“Agent针对任务自动生成并迭代Skill”);执行数据回传的完整性、稳定性需进一步优化。
路线二:仿真验证 ― 代码执行路线
在仿真环境中通过“大模型规划 + 原子动作代码编排”完成任务,不依赖真实机械臂本体,实现“规划-执行-验证”的闭环,其核心价值是“低成本验证、快速沉淀能力、无缝迁移至真实场景”,与路线一形成互补。
1)核心技术原理
该路线的核心逻辑是“仿真环境复刻真实场景,代码编排替代人工示教,能力迁移降低落地成本”,其底层技术原理分为三个关键环节:
• 仿真环境的构建原理:基于GCP G2(NVIDIA L4)硬件平台,部署Isaac Sim + OmniGibson + cuRobo三大仿真工具,构建高保真的工业场景(如巡检环境、抓取场景);同时接入BEHAVIOR-1K数据集,为Agent提供场景训练与验证的数据支撑,确保仿真场景与真实场景的一致性;
• 原子动作的标准化与代码编排:将机器人动作拆解为22个标准化原子动作(Navigation 3个、Arm 4个、Gripper 3个、Perception 12个),统一接口封装,可供Skill RL(强化学习)及上层Agent调用;通过中层代码编排,将Agent规划的任务,转换为原子动作的调用序列,实现“规划→编排→执行”的自动化;
• 仿真到真实的迁移原理:通过统一接口与数据规范,将仿真环境中验证通过的Skill、原子动作代码,无缝迁移至真实机械臂――核心是“接口对齐”,即仿真环境中原子动作的接口,与真实机械臂的接口完全一致,同时通过WASM插件适配硬件差异,确保迁移后无需大量修改代码,降低落地成本。
2)当前技术进展与核心突破
• 仿真环境已完全就绪:完成Isaac Sim + OmniGibson + cuRobo的部署与调试,以“捡易拉罐放到桌上”场景,验证了navigate→pick→place的基本链路,仿真场景的保真度与动作执行的流畅度达到预期;
• 完成22个原子动作的标准化封装:统一接口对外,可被Skill RL及上层Agent直接调用,解决了“原子动作不统一、无法复用”的问题;
• GRPO策略的Skill RL版本已开发完成:可实现多Skill变体的筛选与优化,待与仿真环境联调,验证技能优化与筛选策略的有效性;
• 游戏Demo脚本验证可行:通过API组合原子动作,设计的游戏Demo已验证可行,证明原子动作编排的有效性;
四、核心技术亮点:差异化优势与行业突破
除了双技术路线,Autel EdgeClaw在核心技术上还有多个差异化突破,进一步强化其科技属性,解决行业核心痛点:
4.1 零拷贝图像管道技术
图像数据在整个感知-决策链路中,以base64字符串直接传递,避免了额外的序列化/反序列化开销,大幅提升数据传输效率;同时,prepare_messages_for_provider模块可自动检测图像大小,将超过256KB的图像缩放至512px以内,平衡视觉清晰度与LLM调用成本,适配机器人实时控制需求。
4.2 多层安全策略(工业场景专属)
针对工业场景“误动作代价高昂”的痛点,设计三档自主度控制+多层安全机制:
• 自主度分级:read_only(仅观测不执行)、supervised(执行前人工审批)、full(策略边界内完全自主),可根据场景需求灵活切换;
• 额外安全机制:WASI沙箱(限制WASM插件权限,防止恶意代码)、E-Stop紧急停机、OTP配对、Prompt注入检测、秘密泄露扫描,确保机器人在真实工业场景中可控、安全运行。
4.3 WASM沙箱插件架构(多机型适配核心)
引入三层WASM插件体系(capture.wasm、processor.wasm、command.wasm),每类插件职责严格隔离,且运行于WASI沙箱中,无文件系统、网络权限,确保安全;新机器人接入时,仅需编写对应WASM插件与ROBOT.toml配置文件,无需修改核心代码,大幅降低适配成本,这也是双技术路线实现多机型复用的核心支撑。
4.4 多模型弹性路由与多Agent协作
内置Vertex AI、OpenAI、Anthropic、Ollama等多个LLM提供商适配,通过ReliableProvider包装层,实现自动重试、故障转移,支持per-agent模型路由(如主控用Gemini Pro决策,视觉子Agent用Gemini Flash降本);同时支持多Agent协作,主Agent可将机器人控制任务委派给专属子Agent,实现复杂任务的分工与聚合。
4.5 机械臂物体夹取 Demo 演示
边端EdgeClaw在执行任务时因无法识别瓶子导致失败,将识别失败的图像数据回传至云端AutelClaw;云端通过分析失败数据,对视觉模型或Skill中的识别逻辑进行自动或半自动优化,生成优化后的Skill并下发至边端;边端重新验证,成功识别瓶子并完成任务,验证通过后该Skill沉淀为优质版本,完成“边端执行-云端优化-边端验证”的闭环迭代。
AutelClaw对已有规则的适配性
五、结论
AutelClaw精准解决了具身智能工业化中“感知-决策断层、安全不可控、适配成本高”三大核心痛点,并通过四大技术亮点形成差异化优势。其仿真验证路线以“大模型规划+原子动作代码编排”为核心,不依赖真实机械臂,在仿真侧即可完成全流程规划与执行验证,技术路径清晰、成本可控。
该路线实现了由LLM Agent基于SKILL.md自主分解任务、编排动作,完成从“人工编排”到“自主规划-执行”的闭环。仿真验证通过的能力与接口可无缝迁移至真实机械臂及更多场景,形成“仿真验证-真实落地”的高效链路。这不仅能缩短新任务上线周期、降低试错成本,还可为售前演示与方案验证提供低成本、可复现的环境,与机械臂Skill自优化路线互补,共同支撑新产品快速试跑,推动机器人应用规模化落地。
AutelClaw 让道通的机器人从 “被动执行工具” 升级为 “自主可控的智能体”,既能在仿真中低成本试错,又能在真实工业现场安全、高效、规模化地完成巡检、操作等复杂任务。
本文来源:财经报道网



 首页
首页 微信公众号
微信公众号
 证券之星APP
证券之星APP


